この記事をまとめると
■トラックの自動運転実現に向けた取り組みについて解説
■2023年にUDトラックスが自動運転技術を搭載した実験車を公開した
■2024年5月にはNEXCO中日本が路車協調実験をスタート
新東名の未開通区間で路車協調実験が行われた
自動車メーカー、国や自治体、NEXCOなど自動車に関わる業界全体で取り組まれている「夢の自動運転」。トラックにもその実現がいよいよ現実的になりつつある。
昨年のジャパンモビリティショーではUDトラックスがレベル4(米国自動車技術者協会と国土交通省が定めた6段階の自動運転レベルで、限定された条件下においてすべての運転操作を自動で行なえるシステムのこと)の自動運転技術を搭載したクオンベースのダンプ実験車を展示。神戸製鋼の加古川製鉄所で無人運転で骨材の運搬を行なったその車両は、来場者たちの注目を集めていた。
 クオンベースのダンプ実験車画像はこちら
クオンベースのダンプ実験車画像はこちら
そして今年5月、NEXCO中日本が現在建設中の新東名高速の未開通区間を利用した自動運転の実現に向けた路車協調実験をスタート。2027年開通を予定している同高速の新秦野IC〜新御殿場ICの一部区間で、一般区間の約2.8km、トンネル区間の約3.1kmの高速道路となるルートを利用して実験していた。実験試験のフィールドは、舗装やレーマーク、防護柵など完成して整備されている。
実施期間は5月13日から7月末頃までのおおよそ3カ月間。全10の企業や団体が参加し、NEXCO中日本が提示した7つのユースケースに、参加企業・団体から提案のあった3つのユースケースを加えた以下の10のユースケースについて実験を行なっている。
●NEXCO東日本の提案
1)クルマのセンサーにより検知した前方の障害情報を後続車に通知
2)気象や路面状況の変化をキャッチし、後続車に通知
3)クルマのセンサーにより検知した区画間のかすれ、剥離などを後続車に通知
4)自動運転機能の故障により路肩に停止した車両のICやSAなど安全地帯への誘導
5)渋滞、通行止めなど交通状況をリアルに把握し、最適なルートを後続車に通知
6)渋滞などの車群をリアルタイムに把握し、最適な車線、速度、車間を後続車通知
7)車両から目的地情報を収集し、目的地ごとのマッチングや車両台数、車間などを管理
●参加企業の提案
1)風よけ走行先行車について、走行速度、走行車線および車線変更状況から適性を診断
2)SAやハイウェイオアシスなど広い駐車場にて自動運転車を運行し、施設の利便性を向上
3)インフラ側センサーが検知した情報をすべての車輌と共有し、事故リスクを回避
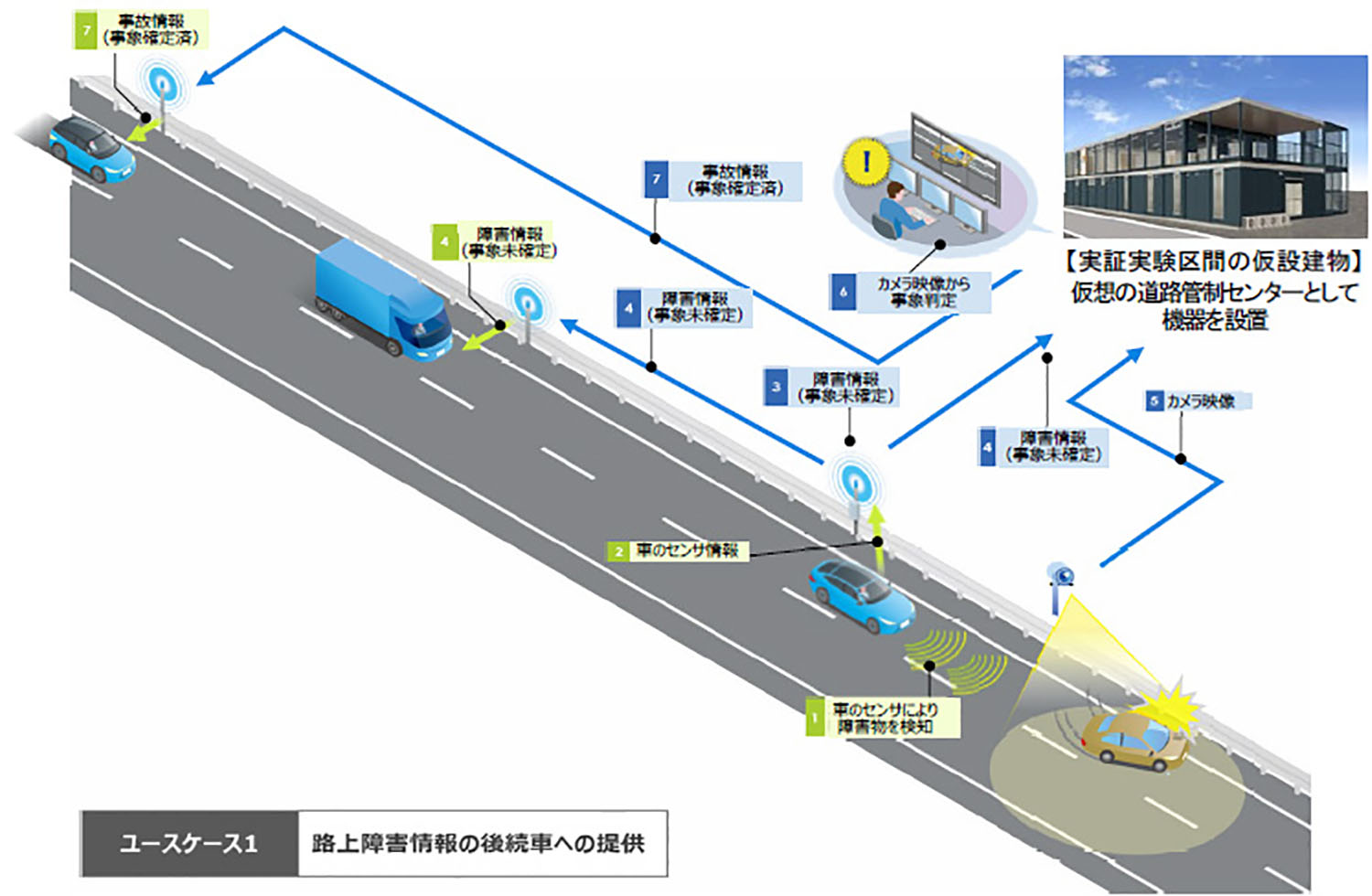 実証実験のイメージ画像はこちら
実証実験のイメージ画像はこちら
この実験は、国土交通省、国土技術政策総合研究所、NEXCO東日本、NEXCO西日本およびNEXCO総研と連携して実施。実験の結果を踏まえて高速道路における路車間通信のシステムなどを検討していくという。路車間の実証実験では自動運転のトラックと乗用車も実際に走らせ上記のユースケースを実証。
この実験により道路インフラによる自動運転のバックアップが実現すれば、物流の2024年問題解決も一気に前進していくことだろう。

























