この記事をまとめると
■最近の国内外のハイパワーモデルの多くが4輪駆動を採用するのは速く走らせるため
■とくに日産のGT-Rは「アテーサE-TS」などによって意のままに操れる特性を持っている
■最新のR35型GT-Rでは大幅な進化を遂げている
クルマを速く走らせるのには4WDが最適
GT-Rだけでなく、近年の国内外ハイパワーモデルの多くは4WDを採用しているが、その理由は至極簡単だ。クルマを速く走らせるために、有り余るパワーを4つのタイヤに分散し、どのような路面状況でも駆動力を無駄なく伝えるためである。
また、4輪がしっかりと路面に接地することで、車体の安定感も向上する。ちなみに市販スポーツラジアルのグリップ力は、かつてのスリックタイヤをも上まわるといわれているが、現在のGTカーのような空力デバイスをもたない市販車が、2輪駆動で受け止められるのは、せいぜい500馬力程度。それ以上のパワーをもつFRモンスターマシンは、何らかの電子デバイスを装着し、駆動力を制御しているのが実情だ(R32型GT-Rが4WDを採用したのも、空力負荷物の装着が禁止されていたGr.Aレースで勝つためだ。その後、スタートしたGT選手権のマシンは空力パーツの進化が進んだことで、FRとなっている)。
 日産スカイラインGT-R(R32のGr.Aテストカー)の走行写真画像はこちら
日産スカイラインGT-R(R32のGr.Aテストカー)の走行写真画像はこちら
確かに、4輪駆動にすると重量は増えるが、有り余るパワーを受け止めることとトレードオフと考えられている。
もうひとつ、4WDは曲がらない、という先入観をもつ方も多いかもしれないが、それは前後50:50で直結されるクロカンのようなパートタイム4WDを想像しているからだ。最新の4WD、とくにオンデマンド式は、アクセル開度やステアリング舵角、ヨーレイトなどの各種センサーから得られる情報をもとに、走行状況に応じて前後駆動になるようにリアルタイムで最適に制御している。
電子デバイスにより意のままに操れる特性にできる
さらに、近年では前後配分だけでなく、左右の駆動力もコントロールできるようになっており、FF車ベース特有のプッシュアンダーやFRベース特有のオーバーステアといった弱点を解消することも可能だ。電子制御技術の進化でベース駆動の区分けはあまり意味をもたなくなり、意のままに操れる特性に仕立てられるようになっている。
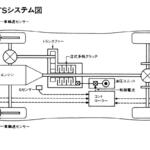
ちなみにその先駆者というべき存在が、第2世代GT-R以降に採用された世界初の電子制御トルクスプリット4WDの「アテーサE-TS」。600馬力という圧倒的なパワーを受け止めながら、FRのセンシティブで楽しい操作性をいかなる場面でも実現できるという画期的なものだった。
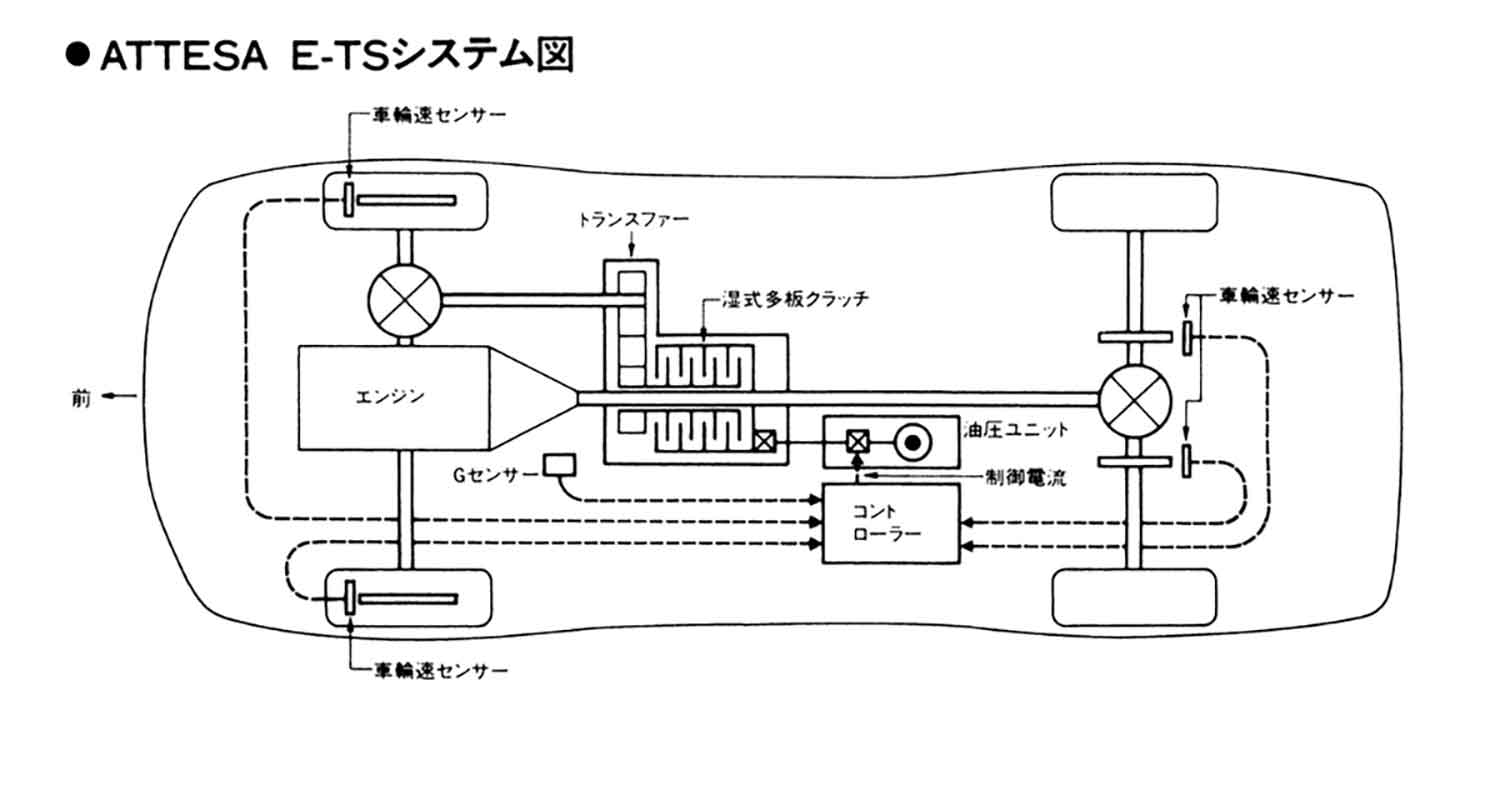 アテーサE-TSのシステム図画像はこちら
アテーサE-TSのシステム図画像はこちら
アテーサE-TSの機構を簡単に説明すると、トランスミッション後端に組み込まれたトランスファーに内蔵される湿式多板クラッチがポイントだ。通常はその多板クラッチをフリーとすることでFRとして機能しているが、後輪のスリップを感知すると、アクチュエータ、ウイズドロワルレバーを介して、湿式多板クラッチを通じてセンタードライブシャフトへとトルクが伝達される仕組みだ、チェーンによって、フロントドライブシャフトを回転させ、前輪に伝わるトルクの強弱は、湿式多板クラッチを押し付ける荷重(摩擦による圧着量)を変化させることで制御される。