隊列走行にも実現に向けたステップがある
じつはこの隊列走行にも、完全自動化への段階的なプロセスがある。まずはじめは自動運転のレベル2に相当する、ドライバーが運転席に座ってハンドルを握って運転を監視しながら、前走車を追従するという状態。これが隊列走行におけるステップ1だと自動車メーカーの団体である日本自動車工業会は定義している。
その次が、後続車両は無人ではないものの、ドライバーは走行中に休憩できるもので、自動運転のレベルで言えばレベル3に相当する状態だが、日本自動車工業会のロードマップではレベル2と3の中間となるレベル2.5相当と見ている。これが隊列走行におけるステップ2だ。
 「後続車無人隊列走行」のイメージ画像はこちら
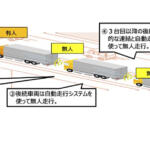
「後続車無人隊列走行」のイメージ画像はこちら その先にあるのが準自動、あるいは自動運転による後続車無人隊列走行なのである。これはステップ3となるもので、ほぼ隊列走行の自動運転化としては最終目標といっていい。
実際には後続車のドライバーの乗降をどういう状態で行うか、車両を入れ替えるのか、荷物だけ積み下ろしするのかなど、さまざまな走行モデルが想定されている。
現在はステップ2の段階で実証実験を行い、課題をひとつずつチェックしてクリアさせていく段階。物流拠点を高速道路と直結させて、運転手の乗り降りや荷物の積み替えを実現させることが、今後、検討されている。
自動運転トラックの専用レーンを設け、一般車両とわけることで割り込みなどを防ぐことも考えられている。
 「後続車無人隊列走行」のイメージ画像はこちら
「後続車無人隊列走行」のイメージ画像はこちら 2023年9月に開かれた警察庁の調査検討会による資料によれば、隊列走行機能をもった自動運転トラックの普及は2030年以降と予測しているので、実際には2035年から40年あたりにようやく実用化されることになりそうだ。
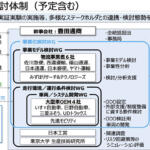
これらは、総務省や経産省、国土交通省、地方自治体、鉄道会社(バスを想定)などが主体となってそれぞれプロジェクトを進めている。参画するトラックメーカーや物流事業者はほぼ同じなのでノウハウは共有できるだろうが、もっと一体となって取り組んだ方が開発のスピードアップは図れそうだ。
高速道路内だけとはいえ、80km/hで走行する無人走行が実現できれば、物流の効率やドライバー不足の解消に役立つのは間違いない。早期の実現を期待したい。