この記事をまとめると
■物流業界ではドライバー不足が問題となっている
■ドライバー不足の解決に向けて実験が進められているのが「後続車無人隊列走行」だ
■「後続車無人隊列走行」は着実に研究のレベルを上げて実現を目指している
隊列走行の後続車両を無人化して運転手不足問題解消を目指す
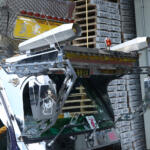
完全自動運転を実現するためには高精細な3Dマップと高性能な車体周囲のスキャニング、あらゆる交通状況を想定した人工知能とクラウドを組み合わせ、最終的にはオペレーターのバックアップも備えた高度なシステムの構築が必要とされている。
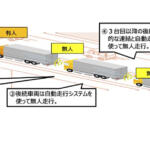
完全自動運転はドライバー不足を解消させる画期的対策と考えられているけれど、あまりに膨大なテストケースを学習させる必要があるため、いまだに実現できている自動車メーカーは存在しない。そこで現実的なドライバー負担軽減の手段として導入に向けた実験が進められているのが「後続車無人隊列走行」だ。これは文字どおり、隊列走行の後続車両を無人化するもの。
 「後続車無人隊列走行」のイメージ画像はこちら
「後続車無人隊列走行」のイメージ画像はこちら
隊列走行とは、複数台の車両が連なって走行していく、カルガモ走行とも呼ばれる形態だ。先頭車両と後続車は無線で通信されており、先頭車のドライバーの操作が即座に後続車にも反映されることで、操作遅れによる危険を防止する。そのため80km/hでの走行中も車間距離が短く、空気抵抗の軽減にも役立つのだ。
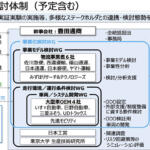
日本でもこの隊列走行を研究開発している。トラックメーカー単独でのテストコース内での試験走行から、国や地方自治体が主導した公道での実証実験へと着実に研究のレベルを上げて、実現を目指している。