
この記事をまとめると
■1980年代、アウディのクワトロにより舗装路での有用性が証明された4WD
■ハイブリッドやEVの登場により、これまで以上に4WD化が容易になった
■モーターでの4WD化はモーター制御による走行安定性の向上で高い安心をもたらす
アウディ・クワトロの登場で4WDのイメージが変わった
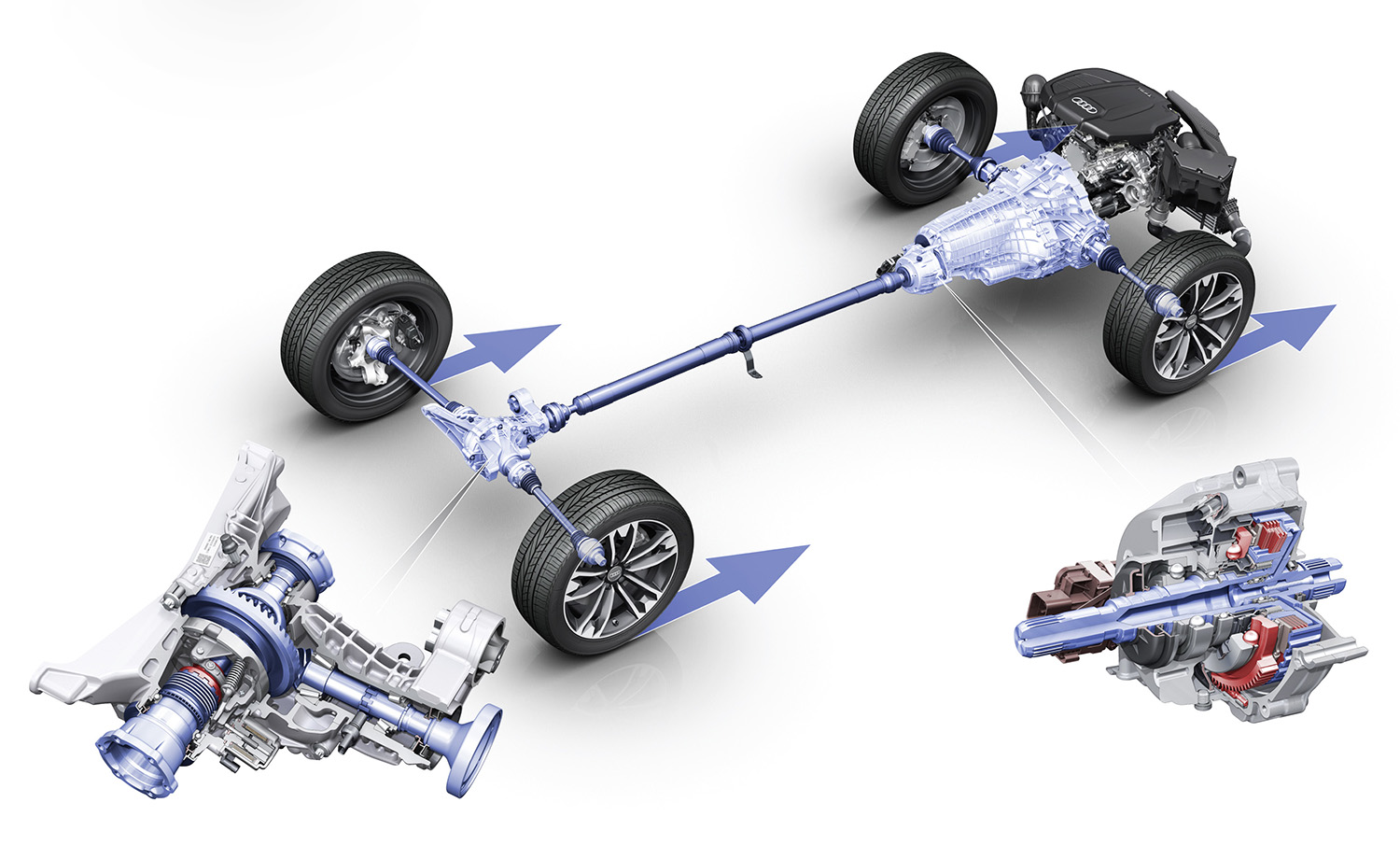
4輪駆動(4WD)は、かつては未舗装の悪路などで確実な前進を確保するため用いられてきた。米国のジープや日本のランドクルーザーなどがその代表だ。しかし、1980年に、ドイツのアウディがクワトロと名付けた新車を発表して以降、舗装路での高速安定性を得る技術としての認識も高まった。ちなみに、クワトロという車名は、イタリア語で「4」の意味だ。


日本では、スバルがレオーネやレガシィのステーションワゴン(ツーリングワゴン)をリゾートエクスプレスと呼び、長距離移動での4WD車の安心を伝えてきた。

乗用車の歴史は、永年にわたり後輪駆動(RWD)を原点とした。しかし、用途によってはより室内空間を広くしたいとか、生産を合理的にしたいなどの要求から、前輪駆動(FWD)が開発され、今日では多くの車種がFWDを基本とするようになっている。
しかし、クルマが発進する際は、力学的に重量が後ろ側へ比重を高めるので、前輪側は重みが抜けやすく、その結果、タイヤが空転しやすい状況が生じる。ことに、未舗装路ではタイヤと路面との間の摩擦が低いので空転しやすい。空転すると前進しにくくなるばかりか、その場でタイヤだけが回転し続けることにより、未舗装路面が掘られてタイヤが沈み込み、ますますクルマが前進しにくくなっていく。
4輪駆動であれば、発進で後ろへ重量が掛かっても、後輪も前進させる駆動力が働くため、確実に発進させることができる。それが、4輪駆動の利点の原点だ。

{kind=link}
舗装路でも、高速になるほどタイヤ性能は限界に近づき、操舵と駆動の両方を担う前輪側はグリップの限界を超えやすくなる。雨天ともなれば、舗装路でも摩擦は減るので、速度が高くなるに従い前輪のグリップを失いやすくなる。そこで、後輪でも駆動力を負担することにより、操縦安定性を高め、アウディは舗装路での高速走行をより安定的に実現するクワトロを生み出した。