4輪を統合制御することでどんな場面でも安心して走破可能
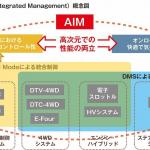
オンロードでは操縦安定性を向上させ、オフロードでは高い走破性を実現するため、新開発の4WDシステムが採用された。4WDシステムとエンジン、トランスミッション、ブレーキ、ステアリングを統合制御することで、ドライバビリティや燃費性能も向上させている。
4WDシステムはそれぞれ仕組みや制御が異なる3タイプを設定。ガソリン車には、「ダイナミックトルクコントロール4WD」と「ダイナミックトルクベクタリングAWD」が設定されている(4WDとAWDは同じ意味だが機構の名称としてトヨタは呼び分けている)。

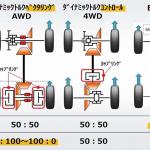
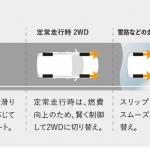
ダイナミックトルクコントロール4WD(G、Xの4WD車)は、従来からあるオーソドックスなオンデマンド4WDで、通常時には2WD(FF)で走行し、スリップなど路面状況が変化したときや発進時に4WDに切り替わるというもの。前後のトルク配分は電子制御カップリングによって自動で行われ、最大で50対50となる。
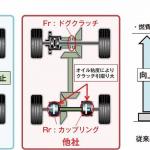
ガソリン車のアドベンチャーとG・Zパッケージに搭載されるのが、ダイナミックトルクベクタリングAWD。こちらも、前後のトルク配分は同じく最大で50対50ながら、左右後輪それぞれに独立した電子制御カップリングを装備し、左右のトルク配分を0対100〜100対0の範囲で自動的に変えるというもの。悪路・良路を問わず、左右で路面の摩擦が異なる状況や旋回時など、左右輪にそれぞれ適切なトルク配分を行うことで、操縦安定性、旋回性を高める。また2WD走行時には、フロントデフとリヤデフをつなぐプロペラシャフトの駆動力を前後ともカットすることで、後輪の駆動抵抗を減らし、燃費性能を高める「ディスコネクト」機構も搭載されている。
ダイナミックトルクコントロール4WDとダイナミックトルクベクタリングAWDには、路面状況に応じて運転モードを選べる「マルチテレインセレクト」が搭載されている。標準状態の「NORMAL」のほか「ROCK&DIRT」と「MUD&SAND」があり、「ROCK&DIRT」では車輪が浮いてしまうような凹凸のある路面で、アクセル開度や後輪への駆動力配分を制御。さらにスリップした車輪にブレーキをかけるブレーキLSD機能も備える。
「MUD&SAND」では砂地や泥濘路を想定し、ある程度のスリップを許容しながら失速しないよう、後輪への駆動力配分を最大化し、スタックを防ぐ。なお、ダイナミックトルクベクタリングAWD搭載車には、スイッチひとつで降坂時の車速を一定の低車速にキープする「ダウンヒルアシストコントロール」も装備されている。
そして、もうひとつの4WDシステムが、ハイブリッド車に搭載される「E-Four」だ。こちらはフロントエンジンからの駆動ではなく、後輪駆動用にモーターを配置したもの。新型RAV4ではリヤのトランスアクスルの出力トルクを30%アップ。さらに、前後駆動力配分を、最大で前20対後80まで高めるよう制御することで、後輪による駆動力が発生するケースを増やしている。より積極的に4WD車として走行させようというものだ。後輪の駆動力配分が大きくなると、旋回性が向上し、また坂道発進時など後ろ側に荷重がかかるような状況での駆動力を高めることができる。
また、E-Fourにはオフロード走行用に「TRAILモード」が設定されている。ガソリン車のマルチテレインセレクトと同じように、悪路や凹凸のある路面でアクセル開度を制御。後輪への駆動力を最大化し、車輪のスリップを抑制するブレーキLSD機能を作動させることで、車両の安定性を高める。いわゆる「悪路走破性」という意味では、ダイナミックトルクベクタリングAWDのほうが機能性に優れるが、E-Fourでも4WD/SUVとしては、相当高いレベルの走行性能を実現していると言える。