
緊急車両の接近対応から道路工事区間での自律運転までを目指す
ジャガー・ランドローバーは、通信技術も組み込んだ「コネクテッド自律運転車両」技術のテストを行うため、100台以上の車両を投入。2016年後半から、イギリスの公道にて研究用車両走行を行う予定だという。

ジャガー・ランドローバーが目指す自律運転の特徴は、車両と車両の間、車両とインフラの間における通信のを行うこと。これにより、以下のことが可能になる。
視野外警告:
・車両が通信をして、ドライバーから目視できない場所にある障害物や危険をドライバーと自律運転車両に伝える。
・車両の減速時にほかのドライバーに危険が生じる場合、付近の車両に「前方危険」警告を送信。受信車両はドライバーに通知する。
緊急車両警告:
・コネクテッド技術が搭載された救急車や消防車、警察車両がほかの一般車両と通信し、距離や方向を配信。サイレンが聞こえる前からドライバーが察知できると共に、サイレンが聞こえても距離や方向がわからない状況が解消される。
さらに、研究車両にはステレオカメラを装備。以下の2つの機能を担う。
セーフ・プルアウェイ:
・車両前方の車両や障害物を検知して、衝突の恐れがあるギヤ選択やスロットルペダル操作があると自動的にブレーキがかかる。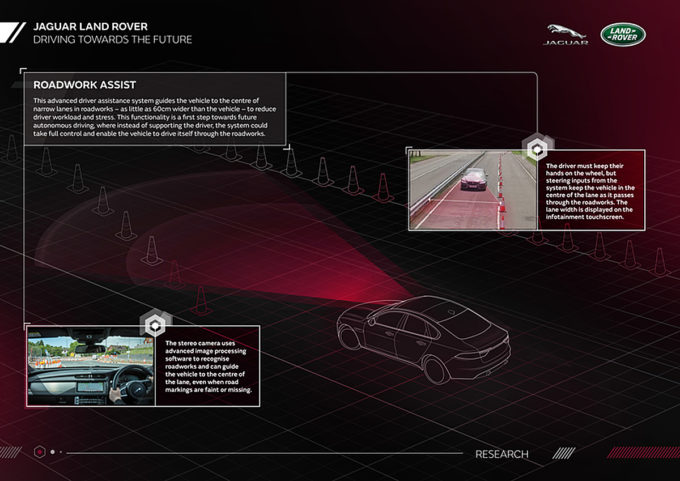

{kind=link}
ロードワーク・アシスト:
・前方道路の3Dビューを生成し、コーンや障害物を認識。ステアリングアシストを加えて、狭い道路でもあっても車両が車線中央をキープすることをアシストする。

ジャガー・ランドローバーの研究主任、トニー・ハーパー氏によると、ロードワーク・アシストは将来的に、道路工事があっても自律運転可能なシステムになるとのことだ。